
不受束缚的软体机器人的优点之一是它们能够机械地适应周围环境和任务,这使它们成为一系列角色的理想选择,从在工厂拧紧螺栓到进行深海探索。现在,他们准备变得更加敏捷和可控。
由工程学院电气与计算机工程助理教授KirstinPetersen领导的一组研究人员设计了一种新的且非常简单的流体驱动执行器系统,使软机器人能够实现更复杂的运动。研究人员通过利用以前阻碍此类机器人运动的粘性来实现这一目标。
该团队的论文“HarnessingNonuniformPressureDistributionsinSoftRoboticActuators”于1月20日发表在AdvancedIntelligentSystems上。该论文的第一作者是博士后研究员YoavMatia。
Petersen的CollectiveEmbodiedIntelligenceLab一直在探索如何通过机器人的机械反射和利用其环境的能力,将机器人的认知能力和行为从“大脑”转移到身体上。通过减少对显式计算的需求,机器人可以变得更简单、更坚固且制造成本更低。
“软机器人的结构非常简单,但比它们的刚性表亲具有更灵活的功能。它们是一种终极的智能机器人,”彼得森说。“现在大多数软体机器人都是流体驱动的。过去,大多数人都在研究如何通过将功能嵌入机器人材料(如弹性体)中来获得额外的收益。相反,我们问自己如何才能做到通过利用流体与材料的相互作用,事半功倍。”
传统上,软体机器人的流体驱动致动器——即移动的部分,如肢体——在均匀加压的流体流过弹性囊或波纹管时起作用。这会迫使执行器按规定移动,该执行器在机械上被设计为沿预定方向弯曲。主要症结在于,如果执行器的内部流动是粘性的,则压力均衡不同,导致执行器的运动变得迟缓,机器人减速。
Petersen的团队从类似的模板开始,只是他们将一系列弹性波纹管与细长管连接起来,在一对平行的柱子中运行,所有这些都在一个封闭的系统中。这种配置允许进行对抗运动——一个拉动一个推动。微小的管子会产生粘性,导致压力分布不均,使执行器弯曲成不同的扭曲和运动模式。这通常是个问题,但该团队找到了一个聪明的方法来利用它。
Matia开发了一个完整的描述性模型,可以预测执行器的可能运动,并预测不同的输入压力、几何形状以及管和波纹管配置如何实现这些运动——所有这些都需要单一的流体输入。这导致执行器可以实现更复杂的运动,但没有以前方法所需的多个输入和复杂的反馈控制。
“今天的惰性结构材料在我们未来的机器中的作用将大不相同,”马蒂亚说。“它在于将代理和计算嵌入到材料中——有机材料、制造过程和管理系统的物理现象——允许它们通过物理机制和内部架构独立行动。这项工作代表了一种新颖的可扩展框架,以显示对材料由材料组成,否则惰性结构物质会代表自己发挥作用。”
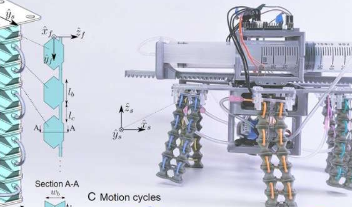
为了展示这项技术,该团队建造了一个六足软体机器人,顶部有两个注射泵,可以以每秒0.05个身体长度的速度行走,也可以蹲伏。但这些只是可能排列的开始。
“我们详细介绍了为未来应用设计这些执行器的完整方法,”彼得森说。“例如,当执行器用作腿时,我们表明只需穿过一组管子,你就可以从鸵鸟般的步态(具有非常宽的姿势)变成大象般的小跑。”
新的流体驱动致动器可用于不同类型的设备,例如机器人手臂,Petersen有兴趣探索在3D配置中放置波纹管将如何产生更有用的运动模式。
“这基本上是一个全新的软体机器人子领域,”她说。“探索那个空间会非常有趣。”