
动物一直是机器人系统的重要灵感来源,因为它们提供了引人入胜的自然示例,说明不同的身体结构如何产生特定的运动和运动方式。虽然大多数以动物为灵感的机器人都受到有腿动物物种的启发,但一些机器人专家一直在探索身体类似于其他动物(包括蛇)的机器人的潜力。
以蛇为灵感的机器人具有独特的特性,可以使它们比其他机器人更适合某些技术应用。例如,它们灵活的蛇形运动可以使它们有利于进行微创手术和内窥镜干预,通过鼻子进入患者身体,然后到达目标区域。
尽管有这些优势,但现有的远程操作这些机器人的方法并不是特别有效。这主要是因为虽然蛇形机器人是超冗余的(即它们具有很大或无限多的自由度),但用于控制其运动的电子设备通常只允许用户指定六个自由度。
为了克服这一局限性,汉诺威莱布尼茨大学的一组研究人员最近开发了一种新策略,用于直观地远程操纵超冗余蛇形机器人的运动。在arXiv上预发表的一篇论文中介绍了这种策略,它允许用户改变蛇形机器人的运动和方向,同时尽可能少地改变它的形状。
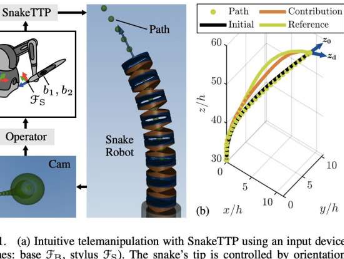
“这篇论文介绍了SnakeTTP,这是一种用于直观远程操作的统一算法,可实现内窥镜任务的运动和枢轴重新定向,”Tim-LukasHabich和他的同事在他们的论文中写道。“基于任务优先级逆向运动学的新方法允许以最高优先级指定不同的位置和方向,并在零空间内进行形状拟合。通过使用Frechet距离最大化两条曲线的相似性来执行形状拟合,同时指定位置和方向末端执行器。”
Habich和他的同事通过要求14名研究参与者控制模拟蛇形机器人的运动并将其带到模拟环境中的目标区域来评估他们的SnakeTTP算法。他们的结果非常有希望,因为控制模拟蛇形机器人的用户可以成功完成运动任务,并且还可以在目标区域内重新定位机器人的运动,同时尽可能少地改变其形状。
“与使用当前链接位置和所需链接位置之间的欧几里德距离的经典策略相比,基于Frechet距离的新颖形状拟合方法将形状误差减少了20.1%,”Habich和他的同事在他们的论文中写道。
虽然这组研究人员引入的新控制算法取得了可喜的成果,但迄今为止仅在模拟机器人上进行了测试。未来在现实环境中的测试和使用真正的蛇形机器人可以进一步验证其有效性。
最终,该算法可以让研究人员更精确地控制蛇形机器人和其他超冗余机器人(例如,受章鱼触手启发的机器人),同时还可以更好地复制蛇形或类似触手的动作。这反过来可以促进这些机器人在医疗环境中的部署,特别是在人体内进行微创外科手术。