
虽然大多数机器人最初是在实验室环境和其他受控环境中进行测试的,但它们旨在部署在现实环境中,帮助人类解决各种问题。在现实世界环境中导航需要处理高度的不确定性和不可预测性,特别是当机器人作为一个团队完成任务时。
近年来,计算机科学家一直在尝试开发框架和模型,以提高机器人在实验室环境之外有效解决问题的能力,因为在实验室环境之外,机器人更有可能遇到不可预见的挑战。这些计算工具最终可以促进机器人的广泛采用,提高它们成功完成任务的能力。
约翰·霍普金斯大学的一个研究小组最近推出了一个新框架,旨在规划团队中机器人的行动,同时考虑它们运行时的不确定性。他们提出的方法是在arXiv上预先发表的一篇论文中介绍的,该方法建立在他们之前的作品中首次引入的计算方法的基础上。
“在不确定性下进行规划是机器人技术的一项基本挑战,”CoraA.Dimmig、KevinC.Wolfe及其同事在论文中写道。“对于多机器人团队来说,挑战进一步加剧,因为随着机器人数量的增加,规划问题很快就会变得计算上难以解决。我们提出了一种使用异构多机器人团队在不确定性下进行规划的新方法。”
Dimmig、Wolfe及其合作者提出的方法适用于团队中的不同机器人可以扮演不同角色的场景,因为所有机器人集体工作以完成户外的共同任务。从本质上讲,该团队引入了这样一种概念,即一些以更高速度移动的机器人可以在给定的现实世界任务中充当侦察兵,在前方巡逻未知或不确定的地理区域,以识别潜在的挑战并更好地规划所有其他机器人的行动。
研究人员在论文中解释说:“这使得能够调查最大限度地减少与拟议路径中的不确定性相关的风险的规划,以及最大限度地减少环境中总体不确定性的规划。”
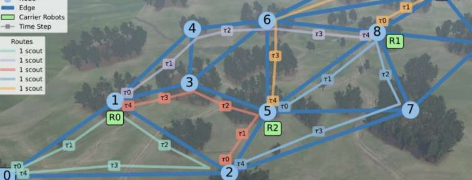
Dimmig、Wolfe及其同事提出的机器人团队行动规划方法依赖于两种主要的编程方法,即动态拓扑图的创建和所谓的混合整数编程。该团队的方法涉及部署两种不同类型的机器人。第一种类型的任务是完成任务,而第二种类型则侦察环境以收集数据并减少不确定性,从而促进任务的完成。
到目前为止,研究人员已经在各种可能的场景下通过计算评估了他们的方法,这些场景可能会在现实世界的任务中引入不确定性。他们的发现很有希望,表明他们提出的方法可以帮助提高机器人团队在包含不同程度不确定性的任务上的表现。
研究人员写道:“我们在许多代表性场景中测试了我们的方法,在这些场景中,机器人团队必须在环境中移动,同时在观察者位置不确定的情况下最大限度地减少检测。”“我们证明,我们的方法在计算上足够容易处理,可以在不断变化的环境中进行实时重新规划,可以在信息不完善的情况下提高性能,并且可以进行调整以适应不同的风险状况。”
未来,迪米格、沃尔夫及其合作者开发的新方法可以使用模拟和物理机器人进行进一步测试,以验证其潜力。此外,最近的这项工作可以激励其他研究团队开发类似的方法来增强机器人在复杂的现实环境中的性能,最终促进其大规模部署。
更多信息:CoraA.Dimmig等人,使用动态拓扑图和混合整数编程