
虽然自动化制造如今无处不在,但它曾经是奥利弗·埃文斯(OliverEvans)等发明家开创的新兴领域。他因在1700年代后期建造并逐渐实现自动化的面粉厂中创造了第一个全自动工业流程而受到赞誉。创建自动化结构或机器的过程仍然是自上而下的,需要人类、工厂或机器人来组装和制造。
然而,大自然进行组装的方式无处不在。动物和植物在细胞水平上自我组装,依靠蛋白质自我折叠成目标几何结构,这些几何结构编码所有不同的功能,让我们保持运转。为了获得更受生物启发、自下而上的组装方法,人造材料需要自己做得更好。但是,以一种可以模仿大自然的多功能性的方式使它们具有可扩展性、选择性和可重新编程性意味着一些初期问题。
现在,麻省理工学院计算机科学与人工智能实验室(CSAIL)的研究人员试图通过一种新方法来克服这些成长中的痛苦:引入可重新编程的磁性材料,将它们涂在不同的部件上——比如机器人立方体——让它们自组装。他们的过程的关键是让这些磁性程序对它们连接的对象具有高度选择性,从而能够将强大的自组装成特定的形状和选定的配置。
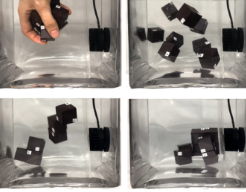
研究人员使用的软磁材料涂层来自廉价的冰箱磁铁,赋予他们建造的每个立方体的每个表面上的磁性特征。这些签名确保每个面在平移和旋转中都选择性地吸引来自所有其他立方体的另一个面。所有立方体——售价约23美分——都可以以非常精细的分辨率进行磁性编程。一旦将它们扔进水箱(他们使用了八个立方体进行演示),在完全随机的干扰下——你甚至可以在盒子里摇晃它们——它们就会相互碰撞。如果他们遇到了错误的伴侣,他们就会离开,但如果他们找到了合适的伴侣,他们就会依恋。
打个比方,想一想您需要将一组家具零件组装成一把椅子。传统上,你需要一组指令来手动将零件组装到椅子上(一种自上而下的方法),但使用研究人员的方法,这些相同的零件一旦通过磁性编程,只需使用一个使它们发生碰撞的随机干扰。然而,如果没有签名,它们会生成椅子,但它的腿会放在错误的位置。
“这项工作在我们可以自组装特定结构的分辨率、成本和效率方面向前迈进了一步,”麻省理工学院电气工程与计算机科学系(EECS)的博士生MartinNisser说。CSAIL的首席作者,以及有关该系统的新论文的主要作者。“以前的自组装工作通常需要各个零件在几何上不同,就像拼图一样,这需要单独制造所有零件。然而,使用磁性程序,我们可以批量制造同质部件并对它们进行编程以获得特定的目标结构。重要的是,重新编程它们以在以后获得新的形状,而无需重新制造新的零件。”
使用该团队的磁性绘图机,可以将立方体放回绘图仪中并重新编程。每次绘图仪接触材料时,它都会在立方体的软磁涂层上创建一个“北”或“南”方向的磁性像素,让立方体在需要时重新用于组装新的目标形状。在绘图之前,搜索算法会检查每个签名是否与所有先前编程的签名相互兼容,以确保它们具有足够的选择性以成功进行自组装。
通过自组装,您可以走被动路线或主动路线。通过主动装配,机器人部件可以在线调整它们的行为以定位、定位并与它们的邻居建立联系。每个模块都必须嵌入用于自组装所需的计算、传感和驱动的硬件。此外,回路中还需要人或计算机来主动控制嵌入每个部分的执行器,使其运动。虽然主动组装已成功地重新配置各种机器人系统,但电子设备和执行器的成本和复杂性一直是扩大自组装硬件数量和缩小尺寸的重大障碍。
使用像这些研究人员这样的被动方法,就不需要嵌入式驱动和控制。
一旦被编程并在一种随机干扰下获得自由,这种随机干扰赋予它们相互碰撞的能量,它们就会自行变形,而无需任何指导智能。
如果你想要一个由成百上千个零件组成的结构,例如梯子或桥梁,你不会想要制造一百万个独特的不同零件,或者当你需要组装第二个结构时不得不重新制造它们.
该团队实现这一目标的技巧在于对磁签名的数学描述,它将每个签名描述为一个二维像素矩阵。这些矩阵确保任何不应连接的磁性编程部件将相互作用以产生与排斥像素一样多的吸引像素,让它们在平移和旋转中对所有非配对部件保持不可知。
虽然该系统目前足以使用少量立方体进行自组装,但该团队希望进一步开发签名的数学描述。特别是,他们希望利用设计启发式方法来组装大量立方体,同时避免计算量大的搜索算法。
“自组装过程在自然界中无处不在,导致了我们在周围看到的极其复杂和美丽的生活,”哥伦比亚大学JamesandSallyScapa创新教授HodLipson说,他没有参与该论文。“但是自组装的基础让工程师们感到困惑:两种注定要结合的蛋白质如何在数十亿种其他蛋白质的汤中找到彼此?由于缺乏答案,到目前为止,我们只能自组装相对简单的结构,其余的则求助于自上而下的制造。这篇论文对回答这个问题做了很大的贡献,提出了一种自组装积木可以相互找到的新方法。希望这将使我们能够开始攀登自组装复杂性的阶梯。”